
盘点:
蔚来理想哪吒阿维塔极氪(升级规划中)等。
越来越多的车企都给自己的高端车装备了激光雷达。 不过目前只有自主高端品牌才应用了这种超高成本的传感器;其中最夸张的是长安。华为和宁德时代合资打造阿维塔汽车。阿11用了三个激光雷达。这真的是目前的标杆了。
可是激光雷达到底有什么意义。与毫米波和超声波雷达有什么区别。智能辅助驾驶汽车非有它不可吗?

超声波雷达是司机们最为熟悉的雷达。车辆的“倒车雷达”就是超声波雷达;这种雷达的价格很低。在汽配城自己加装一套也只是上百元而已。相信驾驶过带有倒车雷达车辆的司机都熟悉它的特点。那就是侦测距离真的很短。有些车辆的倒车雷达只能侦测一米以内的物体。长一些也不过是两三米而已;所以自动驾驶汽车不能只依靠超声波雷达。否则辅助驾驶系统就只能在低速时使用了。
超声波雷达可以适配自动泊车或主动刹车。凡制动距离超过三米的车速区间都不能依靠这种雷达。

由于超声波雷达的成本最低。一般车辆都会安装10-12个雷达探头。
可是毫米波雷达就会很少。有些车辆只有一个。多一些也不过是2~3个。这种雷达肯定很贵吧;事实也确实如此。一般的毫米波雷达需要三四千元。在汽车上属于很贵的传感器了。不过毫米波雷达却很重要。这种雷达的频率范围为30-300GHz。波长1mm-100mm;这些参数都不重要。作为普通司机需要了解的是毫米波雷达的侦测距离。其标准可以达到200米。
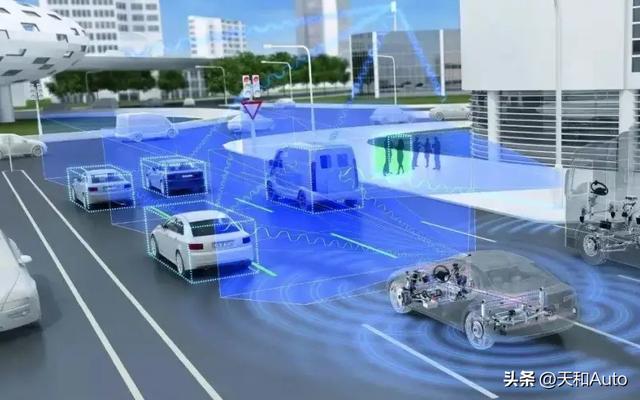
毫米波雷达经历过几次升级。侦测的方式从二维平面逐步升级到三维立体;现在的毫米波雷达可以有基于安装水平面“±2°”的覆盖范围。能形成俯仰角平面波束。可以在有限的范围内描绘出物体的立体结构。可以理解为“3D建模”。这就是毫米波雷达的特点。不过其重要性还不止于此;可以说毫米波雷达的最大意义是受交通气象条件因素的影响小。说白了就是在一些能见度低的气象条件中亦可有效侦测前方障碍物。以保证在复杂的环境中可以使用自动驾驶系统。最起码未来会是这样。
在了解了超声波和毫米波雷达之后。不用讲激光雷达都应该得出结论了。
那就是激光雷达肯定比毫米波雷达更好。到底好在哪呢?
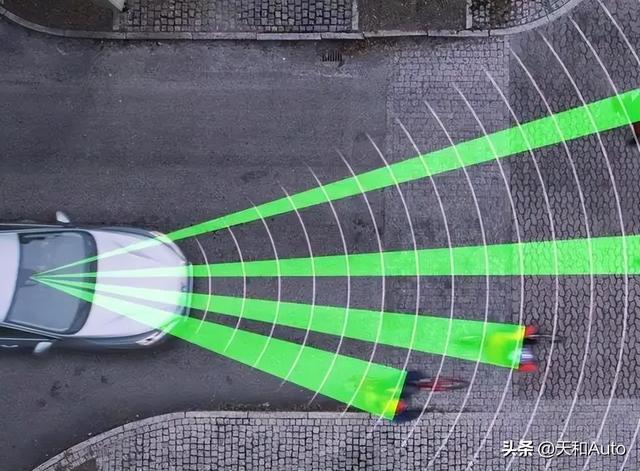
激光雷达不使用一般理解的雷达波来侦测。而是用“激光束”来测距。原理其实与一般理解的“回声定位”一样;激光束遇到目标障碍物之后也会有反射回来的信号。叫做“目标回波”。光速是固定的。那么依据光速和时间即可计算出与障碍物的距离。
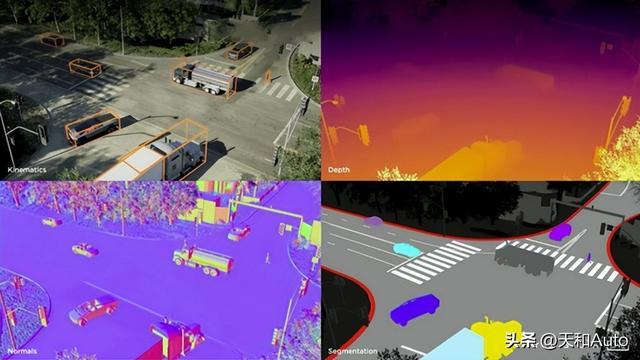
但是这点并非最重要。激光雷达最大的价值还是“3D建模”。其激光束的覆盖面积更大。可以测绘出更高的物体和更宽的范围;在肉眼都不可见的距离点上。利用物体各个位置反射来的激光束回波即可描绘出物体的轮廓。随后在依据处理器的运算来描绘出物体或场景。
这就是激光雷达的最大意义所在。而且激光雷达真的可以非常精准;激光束发射频率可以达到每秒数万个脉冲。假设某激光雷达是每秒一万次脉冲。一分钟就能记录六十万个标定点。这样就能够快速获得障碍物的三维立体影像资料。可以在最短的时间内描绘出场景。更重要的是相比毫米波雷达有限的俯仰角。激光雷达可以在发现正面的障碍物之后。综合车辆的车身资料参数避免碰撞到车辆的任何一个位置(综合高度计算)。
最后再讲一点:激光雷达可以侦测到500米开外的距离。肉眼看不清楚的场景均可依靠激光雷达。
不过。激光雷达也不是没有缺点。
激光雷达会因为特殊的交通气象条件受到很大的干扰。比如水雾和雨雪。包括沙尘都会有所影响。毕竟激光束也是光线嘛;所以激光雷达不能单独应用。需要配合毫米波雷达才能达到真正的高水平。三类雷达缺一不可。

极个别车企用“纯视觉辅助驾驶传感器系统”。这又是啥意思?
字面上看起来还挺高大上。说白了就是只用摄像头的系统。
不考虑在公共道路上复杂的光源对摄像头采集能力的影响。就讲雨天。大雾。浓烟。雪天和沙尘等特殊气象条件里吧。肉眼什么都看不见的时候。摄像头也是什么都看不见;未来的汽车是一定要实现全场景自动驾驶的。所以不使用高成本的毫米波雷达和激光雷达的辅助驾驶系统。只依靠摄像头那就是在胡闹。关于各类雷达和“纯视系”的概念就聊到这里。激光雷达确实很重要。制造成本也确实很高。是毫米波雷达的好几倍。

编辑:天和Auto-汽车科学岛
天和MCN发布。保留版权保护权利
喜欢我们的内容请点赞关注哦







